Guangxi Dynasty Medical’s Research And Development In Hand Rehabilitation And Assistive Grasping Equipment
Hand rehabilitation and assistive grasping devices are topics of significant interest in the current medical field. The functionality of hands is crucial in people's daily lives. However, factors such as stroke, spinal cord injury, nerve damage, Parkinson's disease, and muscular dystrophy can lead to impairments in hand function. Additionally, accidents like car crashes or workplace injuries can also cause hand dysfunction. For patients, rehabilitation training is a key method for restoring hand function. However, traditional rehabilitation equipment and one-on-one counseling therapy often cannot guarantee patients receive sufficient training and rehabilitation intensity.

Development of Rehabilitation Devices
Over the past few decades, with the continuous development of robotic technology, robots have become an indispensable part of the rehabilitation training process. Currently, research mainly focuses on two types of rehabilitation devices: rigid hand exoskeletons and soft assistive gloves. Traditional rigid robots, typically driven by electric motors, have complex mechanical designs and higher weight, which can lead to discomfort and potential risks for patients. In contrast, soft wearable rehabilitation gloves, made of flexible materials and mainly driven by cables, smart materials, or pneumatic/hydraulic actuators, provide a jointless and flexible structure for the hand, making them more comfortable and safer. Soft rehabilitation gloves have many advantages, such as lightweight, portability, high power-to-weight ratio, low cost, and excellent human-machine interaction, making them more suitable and promising for hand rehabilitation training than their rigid counterparts. The use of soft rehabilitation gloves can bring positive effects, helping improve patients' hand rehabilitation treatment, reduce their economic burden, and assist them in returning to society and family life as soon as possible.
Technological Advancements
In the development of soft rehabilitation gloves, inspiration from biomimetics has led to the integration of soft joint structures based on composite fabric materials into glove designs. Utilizing 3D printing technology, lightweight soft gloves capable of bending and stretching can be manufactured. Furthermore, deep learning techniques can be employed for position estimation and control of soft gloves. Additionally, the concept of force feedback gloves has been proposed to generate tactile signals, making remote or virtual tasks more tangible and controllable.
Types of Soft Robotics Drives
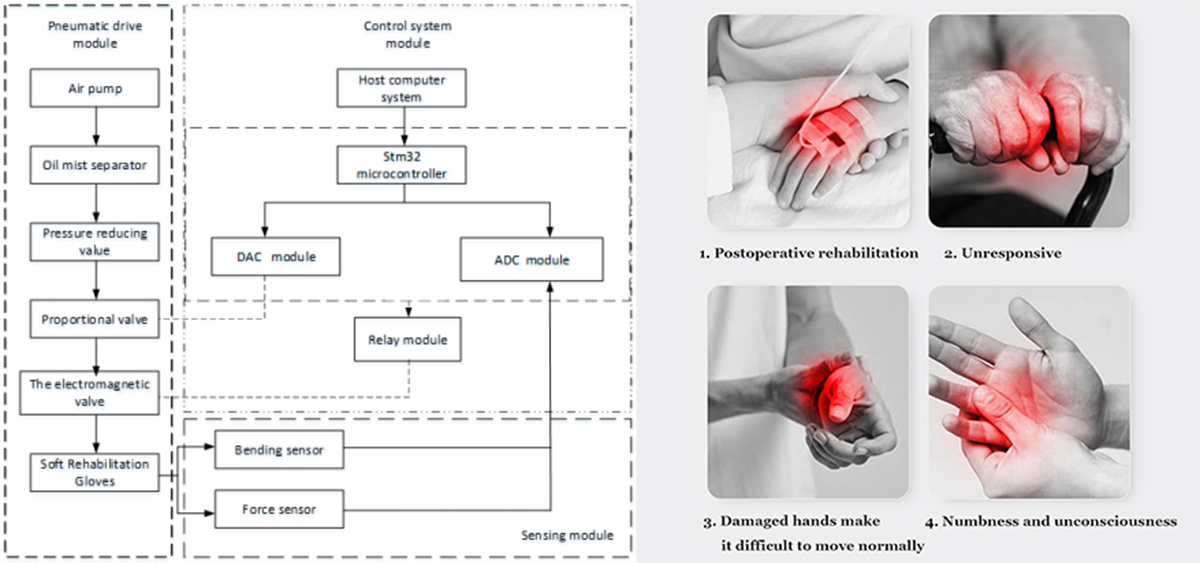
Soft robotic drives mainly include pneumatic/hydraulic drives, cable/tendon drives, and other smart material drives. For pneumatic or hydraulic-driven soft wearable gloves, polymers or fabric materials are typically used to manufacture embedded chambers, which can generate the desired movements such as bending and stretching when pressurized. In recent years, some teams have begun exploring various soft gloves for hand rehabilitation training. Among them, the Guangxi Dynasty Medical team has designed a soft wearable glove using elastic chambers and fiber-reinforced materials. This glove can produce various trajectories such as bending, twisting, and stretching under liquid pressure. Furthermore, they have developed and produced multiple soft robotic rehabilitation training gloves mainly using fabric materials, assisting patients with hand injuries in rehabilitation training and daily life. These hand function rehabilitation gloves provide bi-directional movement modes, including active finger flexion and extension, and increase bending angles through internally wrapped folding chambers. To further improve sensory performance, the use of PDMS material on the skin of soft gloves can be considered due to its convenient electrical properties adjustment.
Advancements in Thumb Assistance
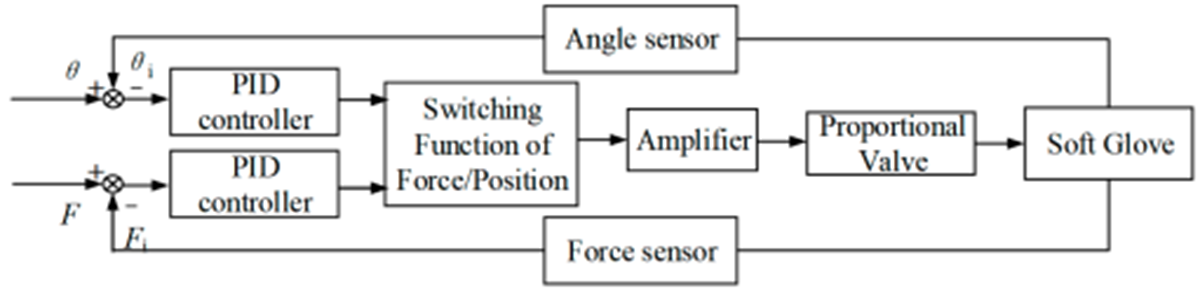
Despite these achievements, the research on soft wearable gloves has mainly focused on the flexion and extension of the five fingers, with relatively fewer studies on thumb abduction assistance. Therefore, our focus lies in the design of thumb abduction assistance. We have developed hardware control system and human-machine interaction interfaces for soft rehabilitation gloves, and implemented force/position mixed PID control algorithms. Finally, we conducted experiments to evaluate the performance of soft rehabilitation gloves in terms of rehabilitation training range and precise grasping ability. The experimental results indicate that the proposed soft rehabilitation gloves have good flexibility and adaptability, effectively assisting patients in rehabilitation training and providing grasping assistance, thereby improving their daily life.
Future Directions
Looking ahead, several key aspects need to be further explored for the future development of soft rehabilitation gloves. Firstly, the design of soft rehabilitation gloves needs to be further optimized to achieve better comfort and adaptability. This includes material selection, structural design, and improvement of mechanical drive systems. In particular, improvements in soft joint structures and range of motion will help enhance the flexibility and functionality of the gloves.
Secondly, the control system of soft rehabilitation gloves also needs continuous improvement. Advanced control algorithms and sensing technologies can enable precise monitoring and control of hand movements, thereby improving the effectiveness and personalization of rehabilitation training. Additionally, the design of human-machine interaction interfaces needs to be more user-friendly and intuitive to ensure that patients can use and master them easily.
Furthermore, the application scenarios of soft rehabilitation gloves in the rehabilitation training process also need further research. In addition to rehabilitation training for specific diseases or injuries, exploring the auxiliary functions of gloves in daily life, such as assisting in gripping and operating household devices, will help improve patients' quality of life and autonomy.
Moreover, the cost-effectiveness of soft rehabilitation gloves is also an important factor to consider. By adopting lower-cost materials, simplifying manufacturing processes, and scaling up production, the manufacturing cost of gloves can be reduced, making them more widely available and accessible.
In conclusion, soft rehabilitation gloves, as innovative rehabilitation assistive devices, have tremendous potential in helping patients recover hand function and improve their quality of life. However, further research and development are needed to address current challenges and continuously improve their performance and effectiveness. With the continuous advancement of technology and in-depth research, soft rehabilitation gloves will bring hope and convenience to more patients in need of rehabilitation training and assistive grasping.
Tel: +86 (0771) 3378958
WhatsApp: +86 19163953595
Company Email: sales@dynastydevice.com
Official Website: https://www.dynastydevice.com
Company: Guangxi Dynasty Medical Device Technology Co.,Ltd
Post time: Oct-18-2024